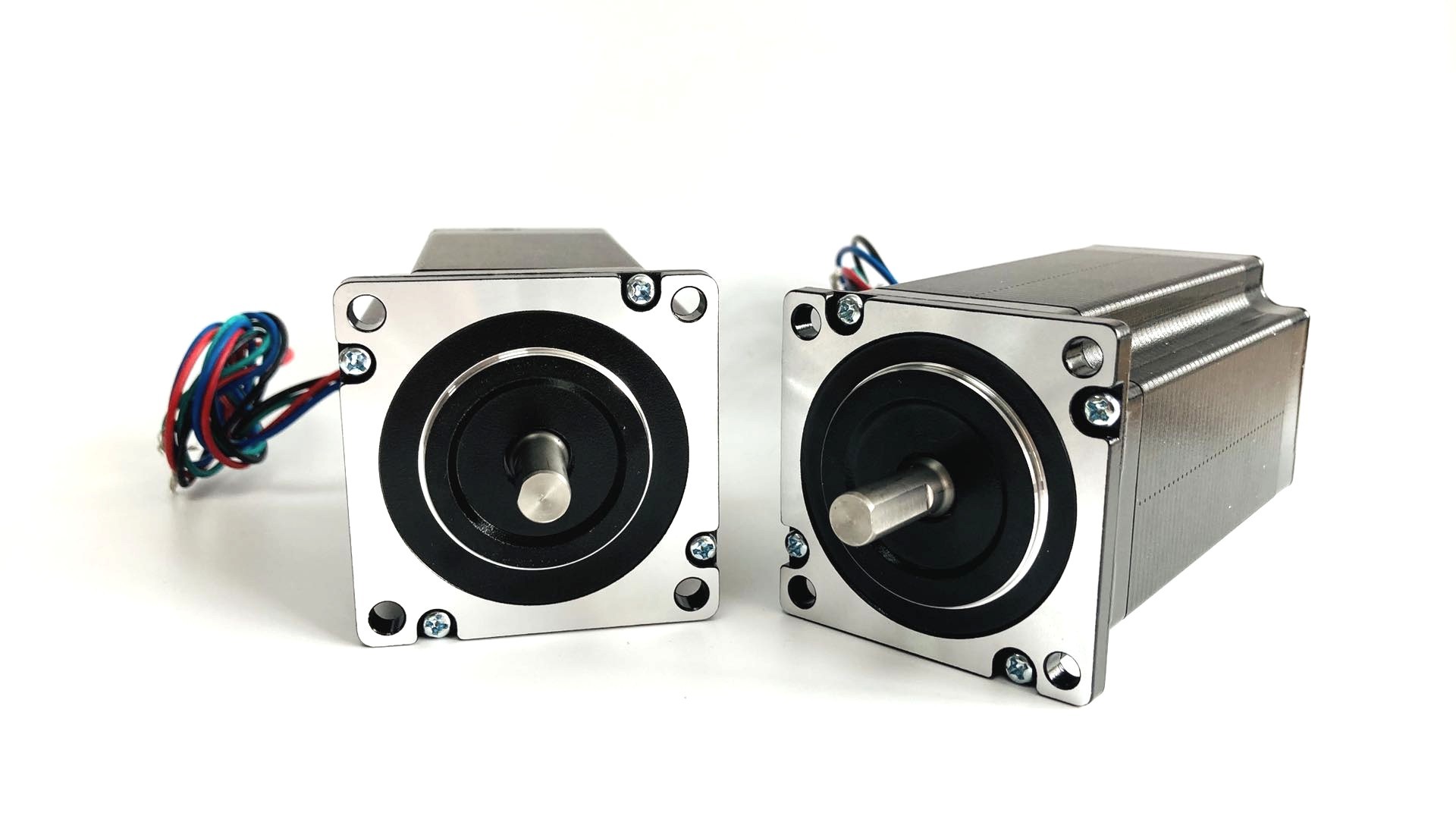
NEMA23 Schrittmotor mit 2 Phasen 57mm 1,8-Grad-hybrider Schrittmotor
Beschreibung des hybriden Schrittmotors NEMA23
1. Genaue Position Steuerung
Die eckige Verschiebung des Schrittmotors kann genaues sein gesteuert durch die Anzahl von elektrischen Impulsen. Winkelgenauigkeit kann innerhalb ±0.09°without gesteuert werden alle mögliche Messwertgeber.
2. Längeres Leben
Schrittmotor ist eine mechanische Struktur, die nicht braucht, durch elektrische Bürste oder Hall-Sensor geändert zu werden, so die Wahrscheinlichkeit verringert und das Bewegungsleben erhöht. Schrittmotorleben normalerweise bestimmt bis zum dem Leben des Lagers.
3. Schrittmotoren sind wirtschaftlich, genau, und einfach zu steuern, und sie können in einer Vielzahl von Umwelt (abhängig von dem Schutzniveau IP gewählt) in den Maschinen mit zusätzlichen Einschließungen oder in der sauberen Umwelt zuverlässig vorzugsweise funktionieren
4. Genaue Geschwindigkeitsregelung
Die Drehzahl des Schrittmotors kann genau gesteuert werden, indem man die Frequenz des elektrischen Impulses steuert.
Die Spezifikationen des hybriden Schrittmotors

- Tretengenauigkeit: ± 5%
- Widerstand-Genauigkeit: ± 10%
- Induktanz-Genauigkeit: ± 20%
- Temperaturanstieg: Maximum 80°C.
- Umgebende Temperatur: -20°C… +50°C
- Isolationswiderstand: 100MOhm Min. 500V DC
- Widerstand: 500V Wechselstrom, 1 Minute
| Kein Modus |
PST57H265-4P20 |
PST57H265-4P30
|
PST57H265-4L40 |
| Haltemoment |
1.7N.m |
| In Verbindung stehender Strom |
2A/Phase |
3A/Phase |
4A/Phase |
| Widerstand |
2 Ω/Phase |
0.9Ω /Phase |
0.5Ω/Phase |
| Induktanz |
6MH/Phase |
2.7MH/Phase |
1.6MH/Phase |
| Trägheit |
280g.cm2 |
| Gewicht |
0.72kgs |
| Länge |
55.5mm |
| Verbindung |
P |
| Kein Modus |
PST57H276-4P30 |
PST57H276-4L40
|
PST57H276-4L50 |
| Haltemoment |
2N.m |
| In Verbindung stehender Strom |
3A/Phase |
4A/Phase |
5A/Phase |
| Widerstand |
1.1Ω/Phase |
0.65Ω /Phase |
0.37Ω/Phase |
| Induktanz |
4.2MH/Phase |
2.35MH/Phase |
1.8MH/Phase |
| Trägheit |
480g.cm 2 |
| Gewicht |
1.1kgs |
| Länge |
76.5mm |
| Verbindung |
P |
L |
Anwendungen von 1,8 Grad Schrittmotor
Schrittmotoren sind in ihrem Gebrauch verschieden, aber etwas von dem höchst Common schließen ein:
- Druckerzubehör 3D
- Textilmaschinen
- Druckmaschinen
- Spielautomaten
- Maschinerie der medizinischen Bildgebung
- Kleine Robotik
- Fräsmaschinen CNC
- Schweißensausrüstung
Kundenspezifische Wellen-u. Befestigungsdetails:
Alle Motoren können mit einfacher oder doppelter beendeter Welle an Kundenantrag-Wellenlänge geliefert werden und andere Maße können auch Bedarfs- geändert werden.
Zahl von Führungen:
Alle Motoren können mit 4, 5, 6 geliefert werden, oder 8 Führungen und wenn erforderlich ein Verbindungsstück können auf unseren Motoren zum Kundenantrag zur Verfügung gestellt werden
Wickelnder Code:
Seit jedem Kunden kann Antrag unterschiedlich sein, wir auflisten nur unsere Standardprodukte in diesem Katalog. Jedoch sind wir glücklich, andere Varianten zu Ihrem Antrag zu zitieren.
Haltemoment:
Haltemoment wird mit zwei Phasen gemessen, die am Nennstrom geliefert werden. Die beiliegenden technischen Spezifikationen sind deshalb typisch.
(Auf Kundenersuchen um spezielle Welle, Führungen, Festlegungen, etc. Wir versehen Sie mit einem einzigartigen Produktcode/einem identifizierenden Merkmal)
Die Wicklung auf diesem Artikel ist ein zweipoliger Draht 4.
hybride Schrittmotoren 0.9° und 1.8°
Winkel des Schritt-1.8°, die Motoren sind direkt mit den Schrittmotor-Antriebsbrettern kompatibel und fahren auch jeden Motor (wenn erforderlich) im Modus d.h. 0.9° des halben Schrittes pro Schritt mit dem Ergebnis der höheren Entschließung, der größeren Leistungsstabilität und der schnelleren tretenden Rate. Richtung, Geschwindigkeit, Beschleunigung/Verlangsamung kann durch einen Schrittmotorprüfer gesteuert werden. und die korrekte elektrische Impulsreihenfolge an den Wicklungen der Schrittmotorergebnisse in einer Winkelrotation des Schrittes 1.8° der Spindel (d.h. 200 Schritte pro Revolution) anwenden. Wenn Sie richtig diesen Motoren geladen werden und gefahren werden, getrennte Ertragschritte produziert. Die Anzahl von Schritten und die Drehzahl werden durch die Anzahl von Impulsen und Frequenz des Eingangssignals bestimmt. Dieses stellt eine ideale Methode für Geschwindigkeits- und Positionssteuerung zur Verfügung. Die Motoren sind direkt mit Schrittmotor-Antriebsbrettern kompatibel.
 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!